

 联系我们
联系我们

库卡机器人如何进行零点校正
工博士致力于机器人导轨的研发生产制造,为客户提供机器人导轨,机器人地轨,机器人第七轴,机器人外部轴,机器人行走轨道,导轨定制等一站式服务,以机器人周边产品工博士自主产品为核心,打造整体应用的综合服务平台。
机器人导轨适用于ABB机器人、库卡机器人、安川机器人、发那科机器人、川崎机器人、OTC机器人、爱普生机器人、遨博机器人、现代机器人、那智机器人、电装机器人、欧姆龙机器人
库卡机器人EMD零点校正的方法 机器人导轨
将库卡机器人所有轴运行到“预校正”位置 机器人导轨
名词解释:预校正位 机器人导轨
“预校正位”参考标识通常是凹槽或凹坑,且都涂有白色油漆。操作机器人,将标识对齐,即为预校正位置。 机器人导轨
将 EMD 依次安装到相应轴的零点探头上 机器人导轨
(注意:当 EMD 安装入探头后,不能手动操作移动该轴。否则将损坏探头。) 机器人导轨

进入菜单“执行零点校正 ” 机器人导轨

选择需要校零的轴,点击“校正”键。 机器人导轨

稍等2秒后按住使能键并保持,使伺服上电。 机器人导轨
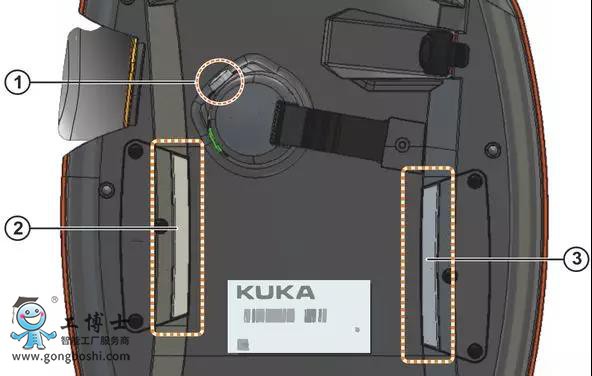
如上图,示教器背后有3个使能键。 机器人导轨
再按住启动键并保持,机器人轴将慢速移动寻找零点标记槽。 机器人导轨
完成后机器人将自动停机,届时再松开使能键以及启动键。 机器人导轨
● 依次重复步骤2-7,完成每一个轴的零点校正。 机器人导轨
以上是标准式(即单一负载规格)的 EMD 校正零点的方法。 机器人导轨
更多资讯:机器人导轨